
بالاعتماد على تقنيات الهاتف النقال؛ تمكنت ثلاث طالبات من كلية الهندسة الكهربائية والميكانيكية في جامعة البعث من تصميم "روبوت" يعمل لا سلكياً باستخدام حساسات الهاتف النقال بتقنية "الأندرويد"؛ وهو ما يتيح الوصول إلى الأماكن التي يصعب للإنسان الوصول إليها.
مدونة وطن "eSyria" التقت بتاريخ 30 كانون الثاني 2016، الطالبة "جميلة الدبيات"؛ التي تحدثت عن مشروع تخرجها في كلية الهندسة الكهربائية قسم إلكترون واتصالات قائلة: «إن الثورة التكنولوجية أدت إلى تطور أنظمة الاتصالات؛ حيث ظهرت أجيال جديدة لتشغيل شبكة الهاتف المحمول، منها (Wi fi)، جعلت الهاتف بنك معلومات ومخزن بيانات المستخدم. ويعد استخدام أنظمة الهاتف المحمول في التحكم والمتابعة من متطلبات العصر خصوصاً "الأندرويد"؛ حيث يحتوي حساسات ذكية يمكن اعتمادها كعصا تحكم بالتطبيقات الروبوتية، كما يوجد الكثير من الأماكن التي يصعب على الإنسان الوصول إليها لما تشكله من خطر على حياته، ومن هنا كانت فكرة المشروع بتصميم روبوت يعمل لا سلكياً عبر حساسات الهاتف المحمول».
إن إحدى صعوبات آلية التحكم هي البحث عن طريقة ربط الروبوتات بأنظمة "الأندرويد" نتيجة تعقيد دارات "الموبايل"؛ الأمر الذي دعا إلى استخدام برمجيات الحاسوب، وتقنية الشبكات الحاسوبية لتكون جزءاً من آلية التحكم
بدورها الطالبة "نورا سلوم" إحدى المشاركات بالمشروع، قالت: «يكمن هدف البحث بتطوير آلية تحكم روبوت من خلال الحساسات الذكية؛ حيث اعتمدنا في بحثنا روبوتاً من أنواع "الليغو"، و"الأريكس"؛ ليكون منصة تجربة عبر إعطائه أوامر عبر شبكة لا سلكية (Wi fi) ومن خلال الهاتف المحمول باستخدام برنامج حاسوبي يقرأ قيم حساسات الحركة بالهاتف».

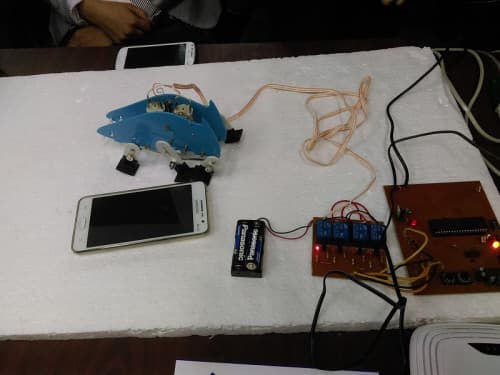

وعن آلية عمله تتابع: «للوصول إلى أفضل النتائج قمنا باستخدام هاتف تم وصله بشبكة لا سلكية مع كمبيوتر عن طريق "راوتر"، حيث تم وصل الكمبيوتر لا سلكياً بواسطة (usb) عن طريق الدارة الكهربائية التي تتحكم؛ فعند التشغيل تقوم الحساسات بأخذ أوامر الحركة معتمدة على "متحكم صغري" مهمته التحكم بمحركات الروبوت كلٌ على حدة لتنفيذ حركات الروبوت إلى الأمام والخلف، والاستدارة إلى اليمين واليسار، وقد اعتمدنا في تصميم الروبوت تركيب عربة روبوت تعليمي يتم التحكم بها عبر تحريك الهاتف المحمول حول المحاور السينية والعينية».
وعن إمكانية استثمار وتطوير المشروع والصعوبات أثناء إعداده، تحدثت الطالبة "سارة سليمان" المشاركة بالمشروع قائلة: «إن إحدى صعوبات آلية التحكم هي البحث عن طريقة ربط الروبوتات بأنظمة "الأندرويد" نتيجة تعقيد دارات "الموبايل"؛ الأمر الذي دعا إلى استخدام برمجيات الحاسوب، وتقنية الشبكات الحاسوبية لتكون جزءاً من آلية التحكم».
وتتابع: «المشروع بشكله الحالي قابل للتطبيق؛ حيث تم تجريبه، كما أنه قابل للتطوير من خلال إضافة دارة التحكم والقيادة على أن تكون ضمن الروبوت بحيث تسهل حركته، كما يمكن تطوير الشبكة؛ فكلما وسعناها تكون هناك تغطية أفضل، كما يمكن تركيب كاميرات لتصوير أماكن من الصعب الوصول إليها كما في المناطق العسكرية والمعامل التي تحتوي إشعاعات وصناعات كيميائية».
الدكتور "مجد الدين علي" مدرّس في كلية الهندسة الكهربائية والميكانيكية في جامعة "البعث"، والمشرف على المشروع قال: «يعد المشروع نواة لجهود بذلت من قبل الطالبات بعد تطبيق ما تلقينه من علوم أثناء دراستهن الجامعية؛ حيث نجحن من خلال مشروعهنَّ بدراسة إمكانية تطوير نظام تحكم روبوت عبر قراءة حساسات الحركة للهاتف المحمول، ومن ثم إعطاء الأوامر للتحكم به من خلال تشغيل الحركات المناسبة، حيث اعتمد البحث روبوتاً من نوع "ليغو" يتم إعطاؤه أوامر عبر شبكة (Wi fi) اللا سلكية، وباستخدام برنامج حاسوبي يقوم بنقل حساسات الحركة في الهاتف».
ويتابع: «المشروع حيوي ومهم، وله تطبيقات عديدة في المصانع ومختلف مجالات الحياة التي يصعب على الإنسان الوصول إليها؛ كمصانع المواد الكيماوية، والمفاعلات النووية. كما يساعد ذوي الاحتياجات الخاصة على القيام بأعمالهم عن طريق التحكم به من خلال هواتفهم، والمشروع بشكله الحالي قابل للاستثمار ويمكن تطويره».
من الجدير ذكره، أن الطالبات كنَّ قد شاركنَ بمشروعهن الذي حمل عنوان: (التحكم اللا سلكي بالروبوت باستخدام حساسات الموبايل الذكية) في مسابقة "الباسل للإبداع والاختراع" بدورتها الأخيرة؛ حيث نال الميدالية البرونزية.